Особенности конструкций башенных кранов
Особенности исполнения башенных кранов для условий сборно-монтажного строительства
Повысить производительность и снизить стоимость работы машины в современных условиях сборно-монтажного строительства можно, если башенные краны будут обеспечивать: удобную и точную наводку монтируемого элемента к месту его монтажа; плавную посадку монтируемого элемента на место установки; хорошую связь машиниста с монтажником и удобство управления движениями крана; безопасность работы; сокращение трудоемкости и продолжительности перебазировки крана на новое место работы.
Точная наводка конструкции к месту ее монтажа обеспечивается четвертым рабочим движением крана, т. е. горизонтальным перемещением крюка с грузом вдоль оси стрелы (к башне или от башни). Для этой цели используют механизм изменения вылета стрелы или механизм передвижения стреловой каретки, несущей на себе грузовой полиспаст.
Механизм изменения вылета стрелы предназначен для подъема и опускания стрелы при ее повороте в вертикаль ной плоскости относительно точки шарнирного прикрепления к баш не. Когда стрела поднимается полиспастом, канат которого запасован по обычной схеме (рис. 65, 66, 67), грузовой крюк поднимается вместе со стрелой, описывая криволинейную траекторию.
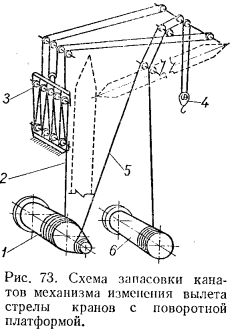
В башенных кранах (рис. 72) применяется такая запасовка стрелового и грузового канатов, которая обеспечивает во время подъема стрелы (I-V) неизменное положение груза по вертикали при его горизонтальном перемещении (1-5). Это достигается тем (рис. 73), что вторая концевая ветвь грузового полиспаста навивается на барабан стреловой лебедки в направлении, обратном навивке сбегающей ветви стрелового полиспаста. В этом случае при подъеме стрелы, т. е. навивке каната 2 стрелового полиспаста 3 на барабан 1, грузовой канат 5 свивается с барабана, удерживая крюк с грузом 4 на заданной высоте.
Поскольку скорость вертикального подъема головки стрелы — величина переменная, ту часть стрелового барабана, на которую навивается грузовой канат, иногда делают по специальному профилю,
что обеспечивает минимальное отклонение груза от горизонтали. При заторможенном барабане /стреловой лебедки подъем и опускание груза осуществляются барабаном 6 грузовой лебедки.
Механизм передвижения стреловой каретки (рис. 74) состоит из тягового каната ,7, направляющих блоков 2 и электрореверсивной лебедки 1. Тяговый канат навивается на барабан лебедки, а два свободных конца каната проходят через направляющие блоки 2 и крепятся к каретке с противоположных сторон. Вращение барабана в ту или другую сторону заставляет перемещаться каретку 5 на колесах 4 по монорельсу 8 вдоль стрелы.
Каретка несет на себе блоки 7, через которые проходит канат грузового полиспаста 6. При перемещении каретки блоки обкатываются по грузовому канату 9 и крюк с грузом, не изменяя своего положения по высоте, перемещается вдоль стрелы вместе с кареткой.
Горизонтальное перемещение груза вдоль стрелы при помощи каретки требует меньше энергии, чем перемещение этого груза изменением вылета. Однако возможность перемещения каретки с грузом только при горизонтальном положении стрелы снижает маневренность крана во время его работы с поднятой стрелой.
Механизм подъема и опускания груза. Плавная посадка конструкции на место установки требует значительного снижения скорости ее опускания. Подъем и опускание груза осуществляются механизмом, представляющим собой обычную электрореверсивную лебедку с приводом от асинхронного кранового двигателя. Механические характеристики таких двигателей (зависимость скорости вращения от развиваемого момента n = f (М)) не позволяют получить малых скоростей посадки груза, так как изменение веса груза резко изменяет скорость опускания. Поэтому в механизмах подъема современных башенных кранов применяются специальные схемы управления элетрооборудованием, дающие возможность изменить механическую характеристику привода и получить устойчивые низкие посадочные скорости при любых колебаниях нагрузки.
Распространенной является схема, в которой используются вихревые тормозные генераторы, монтируемые на одном валу с двигателем. Они состоят из стального массивного ротора, вращающегося в постоянном магнитном поле неподвижного статора. Ротор тормозного генератора соединен с ротором основного двигателя и вращается вместе с ним. Тормозной момент создается благодаря взаимодействию постоянного магнитного поля статора и поля, возникающего от индуктированных в роторе вихревых токов. Он пропорционален скорости вращения ротора (скольжению) и регулируемому току возбуждения обмоток статора. Механические характеристики тормозного генератора и основного двигателя дают серию результирующих жестких механических характеристик привода, обеспечивающих низкие скорости опускания груза на место установки.
Управление работой башенного крана машинист осуществляет из кабины, располагаемой в большинстве случаев на уровне подвеса стрелы. Электрические схемы кранов и их конструкция предусматривают возможность одновременной работы нескольких механизмов, что позволяет машинисту совмещать рабочие движения крана (подъем, поворот, передвижение), сокращая продолжительность цикла и повышая производительность.
При любом по высоте расположении кабины на башне крана машинист не может наблюдать за всеми местами работы монтажников. Поэтому разработаны и применяются системы дистанционного управления работой крана. Монтажник с помощью переносного пуль та непосредственно на рабочем месте подает управляющие команды механизмам по радио или по проводам, связывающим пульт с аппаратурой управления механизмами крана.
Наиболее целесообразно комбинированное управление краном. При такой системе управление ведется машинистом из хорошо оборудованной удобной для работы кабины, а дистанционное управление с места монтажа используется только в некоторых случаях на малых посадочных скоростях.
Представляет интерес для дальнейшего повышения производительности башенных кранов система программно-дистанционного управления. При этой системе операции по доставке деталей со склада (или непосредственно с транспортных средств) на здание выполняются автоматически системой адресования и программного управления двигателями, а точное позиционирование обеспечивается управлением по радио на малых скоростях подъема и опускания грузов. Вместо крановщика краном управляют попеременно два опера тора: такелажник на складе и монтажник на строящемся здании, причем каждый из них имеет свой нагрудный пульт. Управление краном не мешает им выполнять свои основные обязанности. Поскольку оператор находится в непосредственной близости от места расположения деталей, не нужен сигнальщик.
Для составления программы автоматического управления пода чей конструкций к месту их монтажа надо: определить зоны складирования материалов и места остановки панелевозов; обозначить монтажные зоны на здании (в каждой захватке); для подачи крюка в эти зоны определить исходные положения крана и углы поворота стрелы, по которым на кране выставить датчики ориентации.
По составленной программе работа на строительной площадке выполняется в следующем порядке.
После подъема конструкции на небольшую высоту (для проверки надежности строповки) такелажник набирает на своем пульте но мер требуемого участка (зоны), затем подает команду на движение крана. Груз автоматически поднимается на безопасную высоту и автоматически по кратчайшему пути в минимальное время доставляется в заданную зону. Здесь управление краном переходит к монтажнику, который с помощью своего пульта управления устанавливает конструкцию в проектное положение и после ее закрепления, включив программу возврата, посылает крюк крана к такелажнику.
Безопасность работы на кране обеспечивается ограничивающими устройствами, автоматически отключающими механизмы при не правильных действиях машиниста, могущих вызвать аварию. Для безопасной работы на кране необходимо предотвратить следующие неправильные действия: подъем грузов, масса которых превышает допустимую грузоподъемность на данном вылете стрелы; подъем крюковой обоймы до соприкосновения с конструкцией стрелы; движение в конец рельсового пути, когда возникает опасность схода крана с рельсов; излишний поворот при наличии поворотного механизма с канатной передачей; движение каретки по стреле вконец поддерживающей ее балки.
Один из широко применяемых в кранах ограничителей грузоподъемности показан на рис. 75. Принцип его работы заключается в постоянном сравнении фактической загрузки крана с максимально допустимой и выключении двигателей в случае, когда фактическая нагрузка превышает предельно допустимую.
Фактическая нагрузка крана измеряется датчиком, состоящим из упругого кольца 3, потенциометра 2 и герметического корпуса 1 (рис. 75, а). При растяжении кольца ползун потенциометра перемещается и изменяет соотношение плеч своих сопротивлений. Дат чик 6 установлен между двумя канатными тягами 4 стрелы. Усилие растяжения его кольца пропорционально усилию в стреловых канатах и, следовательно, силе тяжести груза. При изменении распорками 5 угла р можно менять величину усилия, передаваемого на кольцо датчика.
Предельно допустимая величина груза зависит от вылета стрелы. Поэтому у основания стрелы 7 устанавливается задатчик предельного груза (рис 75, б). При изменении вылета стрелы ее движение через поводок 8 передается на ось 9 с закрепленным на ней профилированным кулачком 10. По кулачку перекатывается ролик рычага 11, связанный с ползуном 12 потенциометра. Положение ползу на определяет соотношение плеч сопротивлений потенциометра и этим задает предельную величину груза на крюке при данном вылете стрелы. Если изменить профиль кулачка, можно применить такой задатчик на кранах с различными зависимостями предельного груза от вылета стрелы.
Сопротивления плеч потенциометра датчика 1 фактической на грузки и потенциометра задатчика 2 предельного груза включаются по схеме электрического моста сопротивлений (рис. 76). Когда вес поднимаемого груза меньше предельно допустимого при данном вы лете стрелы, мостовая схема не уравновешена и через катушку поляризованного реле РН проходит ток. Этим дается разрешение на работу крана. Если вес поднимаемого груза превысит предельно допустимый, ток, проходящий через реле РН, изменит свое направление, что приведет к размыканию контактов реле и полному отключению крана.
Ограничители высоты подъема крюка основаны на воздействии крюковой обоймы на упор, соединенный с конечным выключателем.
Ограничители движения крана по рельсам, каретки по стреле и поворота крана состоят из ограничивающих упоров и электрических конечных выключателей с рычагом. Ограничивающие упоры устанавливают на месте, где требуется прекратить движение. При достижении конечным выключателем ограничивающего упора его рычаг цепляется за упор и отключает конечный выключатель, останавливая двигатель соответствующего механизма.
Помимо описанных ограничивающих устройств, предотвращающих неправильные действия машиниста, по правилам Горгостехнадзора башенные краны должны иметь устройства, сигнализирующие об опасности и предотвращающие угон крана при ураганном ветре. Для этой цели на башенных кранах устанавливают ветромер-анемометр, измеряющий скорость ветра. Если скорость и продолжительность действия воздушного потока превысят допустимые величины, ветромер подает сигнал об опасности, автоматически отключает механизмы крана и включает противоугонное устройство.